Elektroniskais vītņu skaitītājs uztīšanas mašīnai. Atmiņas atgriezeniskais pagriezienu skaitītājs - Gatavās ierīces - Rakstu katalogs - Mikrokontrolleri - tas ir vienkārši! Kā pielāgot skaitītāju tinuma mašīnai
Radioamatieru praksē bieži rodas nepieciešamība uztīt/pārtīt dažādus transformatoru tinumus, droseles, relejus utt.
Izstrādājot šo mašīnu, tika izvirzīti šādi uzdevumi:
1. Mazie izmēri.
2. Gluda vārpstas palaišana.
3. Skaitīt līdz 10 000 apgriezieniem (9999).
4. Tinums ar automātisku stieples ievilkšanu. Ieklāšanas solis (stieples diametrs) 0,02 - 0,4mm.
5. Iespēja tinumu sekciju tinumus bez pārkonfigurācijas.
6. Rāmju nostiprināšanas un uztīšanas iespēja bez centrālās atveres.

1. attēls.
Uztīšanas mašīnas ārējais skats.
Uztīšanas mašīnas sastāvs.
1. Padeves spole (stieples spole).
2. Bremzēšana (bremžu mehānisms).
3. Stepper motors spoles centrēšanai.
4. Lodīšu mēbeļu vadotnes.
5. Spoles centrēšanas mehānisma optisko sensoru aizvars.
6. Rokturis pozicionētāja pārvietošanai uz citu sekciju, tinot sekciju tinumus.
7. Pogas ieklāšanas virziena manuālai pārslēgšanai.
8. Gaismas diodes ieklāšanas virzienam.
9. Pozicioniera pakāpju motors.
10. Optisko tinumu robežsensoru slēģi.
11. Pozicionētāja skrūve.
12. Bumbu mēbeļu vadotnes.
13. Tinošā spole.
14. Tinuma motors.
15. Pagriezienu skaitītājs.
16. Iestatīšanas pogas.
17. Optiskās sinhronizācijas sensors.
18. Ātruma regulators.
Ierīce un darbības princips.
Barošanas vienība.
Padeves bloks ir paredzēts, lai piestiprinātu tai dažāda izmēra stieples spoli un nodrošinātu stieples spriegojumu.
Tajā ietilpst spoles stiprinājuma mehānisms un vārpstas bremzēšanas mehānisms.

2. attēls.
Barošanas vienība.
Bremzēšana.
Nebremzējot padeves spoli, stieples tinums uz rāmjiem būs vaļīgs un kvalitatīvs tinums nedarbosies. Filca lente “2” palēnina bungu “1”. Pagriežot sviru “3”, tiek pievilkta atsperi “4” - regulējot bremzēšanas spēku. Dažādiem stieples biezumiem tiek regulēta pati bremzēšana. Šeit tiek izmantotas gatavās VCR daļas.

3. attēls.
Bremzēšanas mehānisms.
Spoles centrēšana.
Iekārtas mazie izmēri un atrašanās vieta tinuma spoles un padeves spoles ar stiepli tiešā tuvumā bija jāievieš. papildu mehānisms centrējot padeves spoli.


4., 5. attēls.
Centrēšanas mehānisms.
Uztinot spoli, stieple no spoles iedarbojas uz aizvaru “5”, kas izgatavots “dakšas” un pakāpju motora “3” formā, caur pārnesumkārbu ar 6. nodalījumu un zobsiksnu, gar rullīšu vadotnēm “ 4”, automātiski pārvieto spoli vēlamajā virzienā.
Tādējādi vads vienmēr atrodas centrā, skatīt 4. att., 5. att.:

6. attēls.
Sensori, aizmugures skats.
Sensoru sastāvs un dizains.
19. Optiskie sensori spoles centrēšanas mehānismam.
5. Aizkars, kas nosedz spoles centrēšanas mehānisma sensorus.
20. Aizkari, kas pārklāj pozicioniera virziena pārslēgšanas sensorus.
21. Optiskie sensori pozicionētāja virziena pārslēgšanai.
Pozicionētājs.
Aizkari “20” att. 6 - ir iestatīts tinuma ierobežojums. Pakāpju motors kustina krāvēja mehānismu, līdz aizkars bloķē vienu no sensoriem “21” att. 6, pēc kura mainās dēšanas virziens.
Ieklāšanas virzienu var mainīt jebkurā laikā, izmantojot pogas “1” att. 7.

7. attēls.
Krāvējs.
Rotācijas ātrums stepper motors"9" att. 7, sinhronizēts, izmantojot sensoru “10”, “11” 8. att., ar uztītās spoles rotāciju un ir atkarīgs no izvēlnē iestatītā stieples diametra. Stieples diametru var iestatīt uz 0,02 - 0,4 mm. Izmantojot pogu “8” att. 7, jūs varat pārvietot visu pozicionētāju uz sāniem, nemainot tinumu robežas. Tādā veidā ir iespējams uztīt vēl vienu posmu vairāku sekciju rāmjos.

8. attēls.
Optosensors.
Pozicionētāja un opto-sensora sastāvs (7-8. att.).
1. Pogas ieklāšanas virziena manuālai pārslēgšanai.
2. Gaismas diodes ieklāšanas virzienam.
3. Aizkari, kas pārklāj pozicioniera virziena pārslēgšanas sensorus.
4. Lineārais gultnis.
5. Kaprolona uzgrieznis.
6. Svina skrūve. Diametrs 8mm, vītnes solis 1,25mm.
7. Bumbu mēbeļu vadotnes.
8. Rokturis pozicionētāja pārvietošanai uz citu sekciju, tinot sekciju tinumus.
9. Stepper motors.
10. Optiskais laika sensors.
11. Disks, kas pārklāj sinhronizācijas sensoru. 18 sloti.
Saņemšanas mezgls.

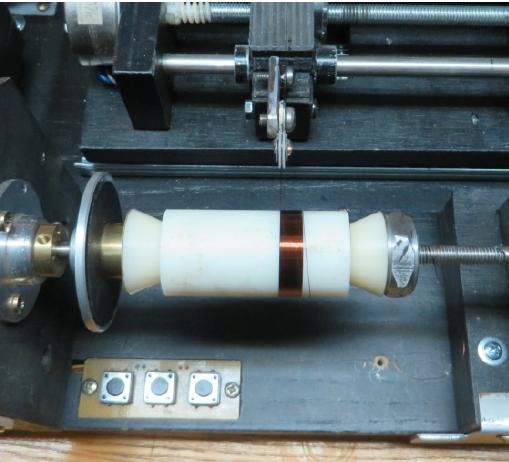
9. attēls.
Saņemšanas mezgls.


10., 11. attēls.
Saņemšanas mezgls.
1. Pagriezienu skaitītājs.
2. Komutatora ātrgaitas motors.
3. Reduktors.
4. Poga “Counter reset”.
5. Ātruma regulēšana.
6. Slēdzis "Sākt tinumu".
7. Uztīšanas spoles stiprināšana.
Satītās spoles rotāciju nodrošina ātrgaitas kolektora motors caur pārnesumkārbu.
Pārnesumkārba sastāv no trim pārnesumiem ar kopējo soli 18. Tas nodrošina nepieciešamo griezes momentu pie maziem apgriezieniem.
Motora apgriezienu skaitu regulē, mainot barošanas spriegumu.

12., 13. attēls.
Rāmja stiprināšana ar caurumu.
Uztvērēja bloka dizains ļauj nostiprināt gan rāmjus ar centrālo atveri, gan rāmjus bez šādiem caurumiem, kas ir skaidri redzams attēlos.
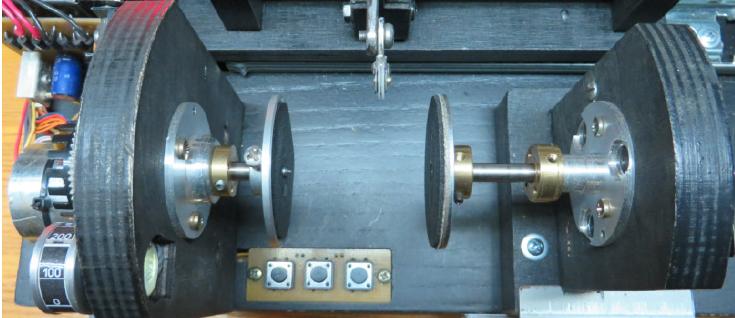

14., 15. attēls.
Rāmja stiprināšana bez cauruma.
Elektriskā shēma.

16. attēls.
Tinuma mašīnas elektriskā ķēde.
Visus iekārtas procesus kontrolē PIC16F877 mikrokontrolleris.
Norāde par stieples apgriezienu skaitu un diametru tiek parādīta četrciparu LED indikatorā. Nospiežot pogu “D”, tiek parādīts stieples diametrs, un tiek parādīts apgriezienu skaits.
Lai mainītu stieples diametru, nospiediet pogu “D” un izmantojiet pogas “+”, “-”, lai mainītu vērtību. Iestatītā vērtība tiek automātiski saglabāta EEPROM. Poga “Zerro” - atiestata skaitītāju. “ISCP” savienotājs tiek izmantots mikrokontrollera programmēšanai.
P.S. Mehānisko rasējumu nav, jo ierīce tika ražota vienā eksemplārā, un dizains tika izveidots montāžas procesā.
Šajā dizainā tika izmantoti izjaukti elementi un mezgli (nav marķēti) no videomagnetofoniem un printeriem.
Es nekādā gadījumā neuzstāju uz precīzu šī dizaina atkārtojumu, bet tikai uz jebkādu tā mezglu izmantošanu manos dizainos.
Atkārtošana no šīs ierīces iespējams, pieredzējuši radioamatieri, kuriem ir mehāniskās prasmes un kuri spēj mainīt dizainu, lai tas atbilstu esošajām mehāniskajām daļām.
Attiecīgi mehānisko daļu var īstenot atšķirīgi.
Dzinēju pārnesumkārbām var būt atšķirīgs sadalījums.
Kritiskie elementi:
Lai programma darbotos pareizi, ir jāievēro vairāki nosacījumi, proti;
Optiskais sensors “17” 1. att., var būt ar citu dizainu, bet tam jābūt ar 18 caurumiem.
Pozicionēšanas skrūves solim jābūt 1,25 mm - tas ir standarta solis skrūvei ar diametru 8 mm.
Pozicioniera pakāpju motors 48 soļi/apgrieziens, 7,5 grādi/solis – tie ir visizplatītākie biroja tehnikas motori.
Mašīnas demonstrācijas video:
Zemāk pielikumā (arhīvā) visi ir apkopoti nepieciešamie faili un materiāli tinumu mašīnas montāžai.
Ja kādam ir kādi jautājumi par montāžu un uzstādīšanu, lūdzu, uzdodiet tos forumā. Centīšos atbildēt un palīdzēt, ja iespējams.
Es novēlu jums visiem veiksmi radošumā un visu to labāko!
Arhīvs "Vinšanas mašīna"
Es jau sen gribēju izveidot tinumu skaitītāju manuālai uztīšanas mašīnai. Vēlējos izgatavot ar akumulatoru darbināmu ierīci no divām mikropirkstu baterijām, kas darba režīmā patērē maz enerģijas un ar vienkāršu spiedpogu vadību - “Reset”, “On/Off”. Skaitītājam jāspēj skaitīt atpakaļ. Dažkārt nākas atritināt pagriezienus, vai arī rodas neparastas situācijas.
STM8S003F3P6 un STM8L051F3P6 bija pieejami TSSOP-20 pakotnēs. Izrādījās, ka S003 nav piemērots manai idejai - tam ir 3-5V barošana, un visticamāk mikrokontrolleris nedarbosies, ja 3V akumulators ir izlādējies par 50%. Tāpēc izvēle krita uz STM8L051F3P6. Saskaņā ar datu lapu tā strāvas padeve ir no 1,8 līdz 3,6 V. Kā displeju tika nolemts izmantot Krievijas ražotāja MELT MT-10T7. Šis LCD tika iegādāts pirms kādiem 7 gadiem, un kopš tā laika neesmu atradis cienīgu pielietojumu. Žēl to izmest.
Parunāsim par sensoru Sākumā es izmantoju integrētos Hall sensorus, kas ģenerē loģisku signālu pie izejas. Ieguvu to no zemūdens gaismas dēļa. Izrādījās, ka viņi pārstāj darboties pat pie neliela apgriezienu skaita. Tas mani apbēdināja. Man bija jāizgudro savs ritenis no jauna. Es nolēmu izmantot halles sensorus no cd-rom piedziņas motora un lm358 op-amp. Šīs idejas darbība no 3. gadsimta bija ārkārtīgi apšaubāma. Bet mēģinājums nav spīdzināšana. Man par pārsteigumu, shēma lieliski darbojās ar šo diētu.

Shēma nevar būt vienkāršāka. R5 - iestata strāvu caur Hall sensoriem U1, U2. Uz DA1 tika izgatavots pastiprinātājs ar KU=50. Signāli no DA1 izejām neatbilst STM8 loģiskajiem līmeņiem, tāpēc tā izejām ir pieslēgti tranzistori Q1, Q2, kas pārstāv līmeņa pārveidotāju. Mikrokontrollera ieejas ir savienotas ar pozitīvo caur rezistoriem, tāpēc nebija nepieciešams iežogot papildu dārzs. Es pat neatceros, kāpēc uz tāfeles ir elementi C1 un C2. Acīmredzot es gatavojos tikt galā ar traucējumiem. Tranzistori faktiski ir bc817-40. Bet diagrammā redzamajiem arī vajadzētu darboties. Hall sensori hw-101A (marķējums D).
Sensora un displeja barošana nāk no mikrokontrollera tapas PB1. Kravnesība šiem nolūkiem ir vairāk nekā pietiekama.

R1 ir džemperis. Es nevarēju atrast 0 omu vērtējumu, tāpēc es instalēju mazāko, kas man bija.
Skaitītāja maksimālā vērtība ir 65535. Poga “RESET” tiek izmantota, lai atiestatītu skaitītāja rādījumus, “ON/OFF” – ieslēdz/izslēdz ierīci.
Iespiedshēmas plati vairāk var saukt par atkļūdošanas plati.


Gatavās ierīces fotoattēls.

Ātruma sensors ir stiklšķiedras disks ar 5mm diametrā un 1mm biezumā pielīmētu niodija magnētu un tāfele ar Hall sensoriem Attālums starp magnētu un sensoriem ir aptuveni 5mm. Puse no pazīstamajām vietām displejā palika neizmantota. Neko gudrāku nevarēju izdomāt - kā tur parādīt barošanas spriegumu. Indikatora kontrasts nav pietiekams, tāpēc man nācās visu dēli noliekt par 45 grādiem. Fotoattēlā sensors piestiprināts ar lenti, tad piestiprināju ar vairākiem elektriskās lentes apgriezieniem. Dizains izrādījās ne pārāk estētiski pievilcīgs, bet man ar to pietiek. Pati uztīšanas mašīna ir nekas vairāk kā vecs plēves pārtīšanas mehānisms. Nezinu, kādu manipulāciju veikšanai tā bija paredzēta, bet tai ir uzlikta plēves spole. Indikators, bateriju nodalījums, mikrokontrollera plāksne ir pielīmēta pie PCB gabala ar karstu līmi.
Strāvas patēriņš ieslēgtā stāvoklī ir 12,8 mA, izslēgtā stāvoklī tas ir 1,71 µA.
Programmatūra.
Kods ir rakstīts IAR vidē Iegultais darbgalds IDE. Mikrokontrolleris darbojas no iebūvēta RC oscilatora HSI ar frekvenci 16 MHz. TIM2 vispārējas nozīmes taimeris ir atbildīgs par apgriezienu skaita skaitīšanu. Tam ir 16 bitu skaitīšanas reģistrs un iespēja strādāt ar kodētāja režīmu. Tas ievērojami atvieglo uzdevumu. Viss, kas jums jādara, ir iestatīt taimeri un aizmirst par to. Tas pats saskaitīs vērtības un ievieš reversās skaitīšanas iespējas. Tiesa, šī režīma darbības īpatnību dēļ vērtības skaitītāja reģistrā ir divas reizes lielākas par reālajām.
Protams, vērtības no TIM2 ir kaut kādā veidā jāizņem un jāparāda ekrānā. To veic 8 bitu TIM4, kas ģenerē pārtraukumus, caur kuriem notiek šī darbība. Pārtraukumi nāk ik pēc 8 ms. Procesors ir pievienojis “atiestatīšanas” pogas aptauju un manipulācijas, lai ekrānā parādītu informāciju no ADC un TIM2.
Akumulatora spriegumu mēra ar ADC. Atsauces sprieguma ieeja ir iekšēji savienota ar mikrokontrollera pozitīvo barošanas avotu. Jūs nevarat izvēlēties iekšējo avotu (kā tas tiek darīts, piemēram, AVR). Bet jūs varat izmērīt šī avota spriegumu. Avota spriegums VREF tiek mērīts rūpnīcā un ierakstīts VREFINT_Factory_CONV baitā, to var nolasīt.
Lai galvenajai programmai nebūtu garlaicīgi, tā skatās, vai ADC konvertēšana un, pamatojoties uz 16 paraugiem, aprēķina vidējo.
Ķēdes ieslēgšana/izslēgšana tiek īstenota, pamatojoties uz ārēju pārtraukumu, nospiežot pogu. Kad pienāk pārtraukums, mēs mainām mainīgo un sēžam un gaidām, līdz poga tiek atbrīvota.
Ja lietotājs vēlas izslēgt ierīci, galvenā programma saglabā TIM2 skaitītāja reģistra vērtību RAM. Izvada visas neizmantotās tapas un iestata tās uz nulli. Ja tas netiek darīts, man rodas traucējumi. Izslēdzam atsauces sprieguma avotu VREF un ADC un ejam gulēt. Tiek izmantots visekonomiskākais apstāšanās režīms. Mikrokontrolleris pamodīsies, nospiežot pogu “Ieslēgts”, izmantojot ārēju pārtraukumu (ārējie pārtraukumi).
Mikrokontrollera programmaparatūra.
Tas ir cits stāsts. Kad es nopirku STM32F0 Discovery, es domāju, ka tajā esošais programmētājs varētu mirgot STM8. Izrādījās, ka tas nevar. Es negribēju tērēt naudu atsevišķam programmētājam, un mani nepārsteidza programmaparatūras iespējas, izmantojot USART (un ne visa 8 bitu ģimene to var izdarīt).
Tinumu ierīces ir noderīgas radioamatieru un elektriķu darbā. vara stieple ar diametru 1,5 mm uz speciālas elektriskās spoles. Rūpnieciskos apstākļos šo procesu prasa ātrumu un precizitāti. Mājas amatnieki var reproducēt šo tehnoloģiju. Lai to izdarītu, jums būs nepieciešama mājās gatavota tinumu mašīna. To raksturo šādi simptomi:
- izveides un darbības vienkāršība;
- iespēja izmantot dažādus transformatorus;
- pieejamību papildu funkcijas: Stiepļu spoļu skaita skaitīšana.
Tinuma mašīnas darbības metode
Tinumu mašīna ir populāra iekārta, ar kuru tiek uztītas transformatora viena slāņa un daudzslāņu cilindriskās spoles un visa veida droseles. Uztīšanas ierīce vienmērīgi sadala tinuma vadu ar noteiktu līmeni spriedze. Tas var būt manuāls vai automātisks, un darbojas pēc šāda principa:
- Rotējot rokturi, stieples vai kabeļa tinums tiek novietots uz spoles rāmja. Tas kalpo kā izstrādājuma pamats un tiek uzlikts uz īpašas vārpstas.
- Vads pārvietojas horizontāli, pateicoties krāvēja virzošajam elementam.
- Pagriezienu skaitu nosaka speciālie skaitītāji. Pašdarinātos dizainos šo lomu var spēlēt velosipēda spidometrs vai magnētiskā niedres slēdža sensors.
Manuālā ierīce vadu ievilkšanai ir diezgan primitīva, tāpēc to ražošanā izmanto reti.
Mehāniski darbināma tinumu mašīna ļauj veikt sarežģītu tinumu:
- privāts;
- toroidāls;
- krusts.

Tas darbojas ar elektromotora palīdzību, kas dzen starpvārpstu, izmantojot siksnas piedziņu un trīspakāpju skriemeļus. Liela loma tajā ir berzes sajūgam. Pateicoties tam, iekārta darbojas vienmērīgi, bez triecieniem vai stieples pārrāvumiem. Vārpsta ar fiksētu rāmi, uz kuras ir uzlikta spole, iedarbina skaitītāju. Uztīšanas mašīna tiek noregulēta ar skrūvi jebkuram ruļļa rāmja platumam.
Mūsdienu modeļi ir aprīkoti digitālās iekārtas. Viņi strādā, izmantojot īpašus dotā programma, kas saglabā informāciju atmiņas ierīcē. Vada garuma un diametra vērtība ļauj precīzi noteikt līniju krustošanās punktu.

Tinuma mašīnas mehānisms
Uztīšanas mašīnas ir iedalītas grupās:
- privāts;
- universāls;
- toroidālais tinums.



Katram produktam ir individuāls dizains.
Uztīšanas mašīna, kas veic stiepļu rindu ieklāšanu, sastāv no šādiem elementiem:
- Tinuma mehānismam ir metināta rāmja forma, kas ir aprīkots ar motoru, zobsiksnas piedziņu, galvas balstu un aizmugurējo balstu.
- Izkārtojuma mehānisms ļauj pārvietot garu materiālu pa tinuma asi. Šī ir metināta konstrukcija, pa kuru pārvietojas ratiņi ar stieples vadošajiem rullīšiem.
- Ierīču modeļi atšķiras viens no otra pēc izmēra un funkcionalitātes.

Standarta modelis vadu novietošanai ar vairākiem līkumiem vienā pagriezienā paredz šādu elementu klātbūtni:

- Galvenais rāmis, kas sastāv no koka vai metāla stabiem, kas ieņem vertikālu stāvokli.
- Starp balstiem ir divas horizontālas asis: viena plāksnēm, otra spolei.
- Nomaināmi zobrati, kas nosūta rotāciju uz spoli.
- Rokturis, kas griež spoles asi. Lai to nostiprinātu, tiek izmantota spailes skava.
- Stiprinājumi: uzgriežņi, skrūves.
Stieples uztīšana uz toroidālajiem serdeņiem tiek veikta, izmantojot specializētu gredzenveida aprīkojumu:
- Ierīce izskatās kā atspole, kas darbojas pēc šūšanas adatas principa.
- Spole ir divu krustojošu gredzenu mehānisms ar noņemamu sektoru, uz kura ir uzstādīts toroidālais rāmis.
- Spoles griešanās tiek iestatīta ar elektromotoru.

Ražošanai nepieciešamie materiāli un aprīkojums
Lai izveidotu savu mašīnu stieples uztīšanai uz apaļa rāmja, jums būs nepieciešamas vairākas detaļas.
Rāmis izgatavots no lokšņu materiāla, nostiprināts ar metināšanu. Optimālais pamatnes biezums ir 15 mm, sānu daļas ir 6 mm. Struktūras stabilitāti nodrošina tās smagums:

- Sānu daļas ir novietotas blakus, un tajās vienlaikus tiek urbti caurumi.
- Sagatavotie elementi tiek piemetināti pie pamatnes.
- Augstajos caurumos ir ieliktas bukses, bet apakšējās - gultņi, kurus var ņemt no lietota diskdziņa.
- Stiprinājumi sānu sienu ārpusē ir droši nostiprināti ar vākiem.
Svarīgas mašīnas konstrukcijas sastāvdaļas ir vārpstas:
- Augšējā vārpsta ar diametru 12 mm notur spoles rāmi. Tās lomu var pildīt līdzīga neveiksmīga punktmatricas printera struktūras daļa.
- Gara materiāla padevējs balstās uz tāda paša diametra vidējās vārpstas. Pirms nodošanas ekspluatācijā to vēlams nopulēt.
- Apakšējā vārpsta ir padeves elements. Tās izmēri ir atkarīgi no vītnes soļa.

Krāvēja uzmavas diametrs un garums ir 20 mm. Tās iekšējā vītne atbilst apakšējās vārpstas vītnei.
Trīši ir trīspakāpju, apstrādāti no tērauda, ar kopējo biezumu ne vairāk kā 20 mm. Pretējā gadījumā jums būs jāpalielina augšējās un apakšējās vārpstas kāti. Katrā blokā ir trīs rievas ar dažādu diametru atkarībā no stieples šķērsgriezuma. To platumu nosaka jostas. Šī kombinācija nodrošina plašu stieples uztīšanas posmu klāstu.
Stiepļu ieguldīšanas ierīce
Stieples ieklāšana un uztīšana tiek veikta, izmantojot trīs plāksnes, kas piestiprinātas kopā ar skrūvēm ar diametru 20 mm. Augšējā daļā ir izveidots neliels 6 mm caurums, kurā ievietota spriegojuma regulēšanas skrūve:
- Iekšējās plāksnes augšējā un apakšējā daļā ir montētas PTFE un tērauda bukses ar diametru un garumu 20 mm.
- Starp ārējiem elementiem ir pielīmēta līdz 2 mm bieza ādas rieva, kas nepieciešama spoles stieples izlīdzināšanai un nospriegošanai.
- Krāvēja augšpusē ir uzstādīts īpašs vītņots stienis vai miniskava, kas nostiprina ārējās plāksnes un regulē spriegojumu. Stiprinājuma attālums ir atkarīgs no stieples diametra.
- Lietošanas ērtībai dizains ir papildus aprīkots ar saliekamo kronšteinu spolei.

Pagriezienu skaitītāju izgatavošana
Lai noteiktu mašīnas brūču pagriezienu skaitu, ir nepieciešams īpašs skaitītājs. Pašdarinātā mašīnā ierīce ir izgatavota šādi:

- Uz augšējās vārpstas ir piestiprināts elektromagnēts.
- Aizzīmogotais kontakts atrodas vienā no sānu sienām.
- Niedru slēdža izejas kontakti ir savienoti ar kalkulatoru vietā, kur atrodas poga “=”.
- Spole ar vadu tiek novietota atsevišķi - uz citas vārpstas ar svirām, kas paceļ ierīci uz augšu un saloka to mašīnas iekšpusē.
Pateicoties šiem elementiem, aprīkojums kļūst kompakts un neaizņem daudz vietas.
Mašīnas darbības princips
Nav grūti strādāt pie projektētās mašīnas. Tehnoloģiskajam procesam ir nepieciešamas noteiktas darbības:
- Augšējā vārpsta ir sagatavota darbam: tiek noņemts skriemelis, iestatīts nepieciešamais spoles rāmja garums un uzstādīts labais un kreisais disks.
- Augšējā vārpstas atverē tiek ievietots stiprinājums, centrēts un rāmis tiek nofiksēts ar speciālu uzgriezni.
- Nepieciešamais skriemelis primārajam tinumam ir uzstādīts uz padeves vārpstas.
- Pretī spoles rāmim ir uzstādīts krāvējs.
- Siksna tiek novietota uz skriemeļiem gredzenā vai astoņu figūru veidā, atkarībā no uzstādīšanas veida.
- Metāla stiepli ievieto zem papildu vārpstas, ievieto rievā un nostiprina.
- Stieples spriegojums tiek regulēts, izmantojot skavas, kas atrodas krāvēja augšpusē.
- Vadam jābūt cieši aptītam ap spoles pamatni.
- Ierakstīts kalkulatorā skaitliskā vērtība"1+1".
- Katrs vārpstas apgrieziens pievieno noteiktu skaitu.
- Ja pagriezienus nepieciešams attīt atpakaļ, skaitļošanas ierīcē nospiediet “–1”.
- Kad stieple sasniedz pretējo rāmja daļu, izmantojiet skavu, lai mainītu jostas stāvokli.
Dažāda biezuma metāla stieplēm skriemelis ir korelēts ar tinuma soli.
Daudzās salīdzinoši nesen ražotās sadzīves tehnikas un rūpnieciskās automatizācijas ierīcēs ir uzstādīti mehāniskie skaitītāji. Tie ir izstrādājumi uz konveijera, stiepļu pagriezieni uztīšanas mašīnās utt. Bojājuma gadījumā līdzīgu skaitītāju atrast nav viegli, un to nav iespējams salabot rezerves daļu trūkuma dēļ. Autors ierosina mehānisko skaitītāju aizstāt ar elektronisku. Elektroniskais skaitītājs, kas izstrādāts, lai aizstātu mehānisko, izrādās pārāk sarežģīts, ja tas ir veidots uz mikroshēmām ar zemu un vidēju integrācijas pakāpi (piemēram, K176, K561 sērija). it īpaši, ja ir nepieciešams apgrieztais konts. Un, lai saglabātu rezultātu, kad strāva ir izslēgta, ir nepieciešams nodrošināt rezerves akumulatoru.Bet jūs varat izveidot skaitītāju tikai uz vienas mikroshēmas - universāla programmējama mikrokontrollera, kas ietver dažādas perifērijas ierīces un spēj atrisināt ļoti plašu uzdevumu klāstu. Daudziem mikrokontrolleriem ir īpaša atmiņas zona - EEPROM. Tajā ierakstītie dati (arī programmas izpildes laikā), piemēram, pašreizējais skaitīšanas rezultāts, tiek saglabāti pat pēc strāvas izslēgšanas.
Ierosinātajā skaitītājā tiek izmantots ģimenes mikrokontrolleris Attiny2313 AVR uzņēmumi Almel. Ierīce realizē apgriezto skaitīšanu, parādot rezultātu ar nenozīmīgo atcelšanu
strops uz četru bitu LED indikators, saglabājot rezultātu EEPROM, kad barošana ir izslēgta. Lai savlaicīgi noteiktu barošanas sprieguma samazināšanos, tiek izmantots mikrokontrollerī iebūvēts analogais komparators. Skaitītājs atceras skaitīšanas rezultātu, kad strāva tiek izslēgta, ieslēdzot to atjauno, un, līdzīgi kā mehāniskais skaitītājs, ir aprīkots ar atiestatīšanas pogu.
Skaitītāja ķēde ir parādīta attēlā. Organizēšanai tiek izmantotas sešas B porta līnijas (РВ2-РВ7) un piecas D porta līnijas (ACVN, PD1, PD4-PD6). dinamisks displejs skaitīšanas rezultāts uz LED indikatora HL1. Fototranzistoru VT1 un VT2 kolektora slodzes ir rezistori, kas iebūvēti mikrokontrollerī un ir iespējoti ar programmatūru, kas savieno atbilstošās mikrokontrollera tapas ar tā barošanas ķēdi.
Skaitīšanas rezultāts N pārtraukuma brīdī palielinās par vienu optiskie sakari starp izstarojošo diodi VD1 un fototranzistoru VT1, kas rada pieaugošu līmeņu starpību pie mikrokontrollera INT0 ieejas. Šajā gadījumā līmenim pie ieejas INT1 jābūt zemam, t.i., fototranzistors VT2 ir jāizgaismo ar izstarojošo diode VD2. Brīdī, kad INT1 ieejā palielinās diferenciālis un INT0 ieejā ir zems līmenis, rezultāts samazināsies par vienu. Citas līmeņu kombinācijas un to atšķirības ieejās INT0 un INT1 skaitīšanas rezultātu nemaina.
Kad ir sasniegta maksimālā vērtība 9999, skaitīšana turpinās no nulles. Atņemot vienu no nulles vērtības, tiek iegūts rezultāts 9999. Ja atpakaļskaitīšana nav nepieciešama, varat izslēgt no skaitītāja izstarojošo diodi VD2 un fototranzistoru VT2 un savienot mikrokontrollera INT1 ieeju ar kopējo vadu. Skaits tikai turpinās pieaugt.
Kā jau minēts, barošanas sprieguma samazināšanās detektors ir mikrokontrollerī iebūvētais analogais komparators. Tas salīdzina nestabilizēto spriegumu pie taisngrieža izejas (diodes tilts VD3) ar stabilizēto spriegumu integrētā stabilizatora DA1 izejā. Programma cikliski pārbauda salīdzinājuma stāvokli. Pēc skaitītāja atvienošanas no tīkla taisngrieža filtra kondensatora C1 spriegums pazeminās, un stabilizētais spriegums kādu laiku paliek nemainīgs. Rezistori R2-R4 tiek izvēlēti šādi. ka salīdzinājuma stāvoklis šajā situācijā ir pretējs. To konstatējusi, programmai izdodas ierakstīt pašreizējo skaitīšanas rezultātu mikrokontrollera EEPROM pat pirms tas pārstāj darboties strāvas atslēgšanas dēļ. Nākamajā reizē, kad to ieslēdzat, programma nolasīs EERROM ierakstīto numuru un parādīs to uz indikatora. Skaitīšana turpināsies no šīs vērtības.
Ierobežotā mikrokontrollera tapu skaita dēļ, lai pievienotu SB1 pogu, kas atiestata skaitītāju, tika izmantota tapa 13, kas kalpo kā komparatora (AIM) invertējošā analogā ieeja un vienlaikus kā skaitītāju “digitālā” ieeja. PB1. Sprieguma dalītājs (rezistori R4, R5) šeit nosaka līmeni, ko mikrokontrolleris uztver kā augstu loģisko Nospiežot pogu SB1, tas kļūs zems. Tas neietekmēs salīdzinājuma stāvokli, jo spriegums AIN0 ieejā joprojām ir lielāks nekā AIN1.
Nospiežot pogu SB1, programma parāda mīnusa zīmi visos indikatora ciparos, un pēc tā atlaišanas tā sāk skaitīt no nulles. Ja izslēdzat skaitītāja strāvu, kamēr poga ir nospiesta, pašreizējais rezultāts netiks ierakstīts EEPROM, un tur saglabātā vērtība paliks nemainīga.
Programma ir veidota tā, lai to varētu viegli pielāgot skaitītājam ar citiem indikatoriem (piemēram, ar parastie katodi), ar atšķirīgu iespiedshēmas plates izkārtojumu utt. Lietojot, būs nepieciešama neliela programmas korekcija kvarca rezonators uz frekvenci, kas vairāk nekā par 1 MHz atšķiras no norādītās.
Ja avota spriegums ir 15 V, izmēra spriegumu mikrokontrollera paneļa 12. un 13. tapās attiecībā pret kopīgs vads(10. tapa). Pirmajam jābūt diapazonā no 4...4,5 V, bet otrajam jābūt lielākam par 3,5 V, bet mazākam par pirmo. Pēc tam avota spriegums tiek pakāpeniski samazināts. Kad tas nokrītas līdz 9...10 V, sprieguma vērtību starpībai pie 12. un 13. tapām jākļūst par nulli un pēc tam jāmaina zīme.
Tagad jūs varat uzstādīt ieprogrammēto mikrokontrolleri panelī, pievienot transformatoru un pievienot tam tīkla spriegumu. Pēc 1,5...2 sekundēm jānospiež poga SB1. Skaitītāja indikators parādīs skaitli 0. Ja indikatorā nekas netiek parādīts, vēlreiz pārbaudiet sprieguma vērtības mikrokontrollera AIN0.AIN1 ieejās. Pirmajam jābūt lielākam par otro.


Kad skaitītājs ir veiksmīgi palaists, atliek tikai pārbaudīt skaitīšanas pareizību, pārmaiņus ēnot fototranzistorus ar IR stariem necaurspīdīgu plāksni. Lai iegūtu lielāku kontrastu, indikatorus vēlams pārklāt ar sarkanu organiskā stikla filtru.

Turklāt, ja kāds saliek skaitītāju uz Atiny2313 bez kvarca,
Es ieprogrammēju drošinātājus šādi
ASM avots
Programmaparatūra
Pārskatījis vairākus žurnālā publicētos skaitītāju dizainus dažādiem mērķiem(piemēram, ), es nolēmu izstrādāt savu pagriezienu skaitītāja versiju, kas izmanto mikrokontrollera nepastāvīgo atmiņu. Rezultātā bija iespējams izveidot vienkāršu un ērti lietojamu tinumu skaitītāju tinuma mašīnai, kas nesatur trūcīgas detaļas.
Tas spēj skaitīt no 0 līdz 9999 vārpstas apgriezieniem, pēc tam indikatora rādījumi tiek atiestatīti uz nulli un skaitīšana sākas no jauna. Kad vārpsta griežas pretējā virzienā, indikators katru apgriezienu samazina rādījumu par vienu.
Rīsi. 1
Skaitītājs sastāv no vairākiem mezgliem (1. att.). Konstrukcijas pamatā ir mikrokontrolleris DD1, kuram caur strāvu ierobežojošiem rezistoriem R10-R16 ir pievienots četrciparu LED indikators HG1. Divi opto savienotāji - IR izstarojošā diode - fototranzistors (VD2VT1, VD3VT2) - veido mašīnas darba vārpstas ātruma sensoru, ģenerē impulsus zems līmenis, ar kuru mikrokontrolleris nosaka griešanās virzienu un vārpstas apgriezienu skaitu. Atmiņas atiestatīšanai ir poga SB1, kā arī palīgķēdes: R2C2, kas darbojas kā daļa no mikrokontrollerī iebūvētā pulksteņa ģeneratora, VD1C1, kas uztur barošanas spriegumu, kas nepieciešams, lai mikrokontrolleru pārslēgtu SLEEP režīmā, un R6R8, kas uzrauga skaitītāja barošanas spriegumu.

Ir zināms, ka PIC saimes mikrokontrolleri ir diezgan kaprīzi, strādājot ar EEPROM (it īpaši, ja rakstīšana uz to notiek automātiski). Barošanas sprieguma samazināšana var kropļot atmiņas saturu Kad skaitītājs darbojas, mikrokontrollera līnija RB1 (7. kontakts), kurai pievienota R6R8 ķēde, tiek aptaujāta par barošanas sprieguma esamību, un, ja tas pazūd, tad pateicoties VD1C1 shēmai, mikrokontrollerim izdodas pāriet miega režīmā, tādējādi bloķējot turpmāku programmas izpildi un aizsargājot informāciju EEPROM. Skaitīšanas procesā mikrokontrolleris saglabās skaitļus atmiņā pēc katra mašīnas darba vārpstas apgrieziena. Katru reizi, kad tiek ieslēgta strāva, HG1 indikators parādīs numuru, kas bija pirms izslēgšanas.
Sensors ir neliela iespiedshēmas plate (22x22 mm), uz kuras ir uzstādītas divas izstarojošās diodes un divi fototranzistori, kas uzstādīti tā, lai tie veidotu divus optiskos raidītāja-uztvērēja kanālus. Kanālu optiskās asis ir paralēlas, starpaksiālais attālums ir aptuveni 10 mm.
Uz mašīnas darba vārpstas ir nekustīgi nostiprināts diska formā, kas izgatavots no cieta, necaurspīdīga materiāla IR stariem (teksolīts, getinakss, metāls, plastmasa) 1...2 mm biezumā. Aizkara diametrs ir 35...50 mm, centrālās montāžas atveres diametrs ir vienāds ar vārpstas diametru. Dēlis ir piestiprināts pie mašīnas tā, lai aizkars, griežoties ar vārpstu, varētu bloķēt abus IR starus.
Aizkarā tiek izgriezts izgriezums nepabeigta sektora formā. Izgriezuma leņķiskajam platumam un dziļumam jābūt tādam, lai vārpstai griežoties, aizvars nodrošinātu īslaicīgu IR starojuma pāreju vispirms tikai pa vienu kanālu, tad pa abiem un visbeidzot tikai caur otru, kā shematiski parādīts attēlā. att. 2. Kanāli, kas ir atvērti vienā vai otrā pozīcijā, tiek parādīti krāsaini. Šī sensora signālu secība dod mikrokontrollerim iespēju noteikt mašīnas darba vārpstas griešanās virzienu
.
Skaitītāju darbina trīs AA galvanisko elementu (R6) akumulators, taču jūs varat izmantot jebkuru tīkla bloku ar stabilizētu izejas spriegumu 5 V.
Sensors ir uzstādīts uz iespiedshēmas plate izgatavots no folijas stikla šķiedras 1 mm biezas. Tāfeles zīmējums ir parādīts attēlā. 3. Apdrukāto vadītāju pusē ir pielodēts strāvu ierobežojošais rezistors R3, no otras - emitējošās diodes un fototranzistori.
Pārējās daļas (izņemot akumulatoru GB1 un slēdzi SA1) ir novietotas uz otras plāksnes, kas izgatavota no tās pašas stikla šķiedras. Tās zīmējums ir parādīts attēlā. 4. Visi rezistori (izņemot R3) ir novietoti apdrukājamajā pusē virsmas montāžas veidā, un mikrokontrolleris, digitālais indikators, kondensatori, diode, poga SB1 un džemperu vadi - pretējā pusē. Mikrokontrolleris ir uzstādīts panelī, kas pielodēts pie tāfeles.
Sensoru panelis ir piestiprināts pie galvenā ar diviem kronšteiniem, izliekts no skārdām vara stieplēm ar diametru 1,2 mm un pielodēts pie malu apdrukātiem dēļu vadītājiem. Lai piestiprinātu dēļus pie mašīnas korpusa, tiek izmantoti paštaisīti turētāji ar skrūves aci, kas izgatavoti no tās pašas stieples un arī pielodēti pie galvenās plates.

Rīsi. 4

Vispārīgs skats uz vienu no skaitītāja dizaina iespējām, kas uzstādīts uz tinuma mašīnas, ir parādīts fotoattēlā attēlā. 5. Iekārtas aizmugurē ir piestiprināts sprieguma elementu akumulators ar slēdzi.
Sensoram papildus diagrammā norādītajiem varat izmantot izstarojošās diodes SEP8706-003, SEP8506-003, KM-4457F3C, AL144A, AL108AM un citus, kā arī fototranzistorus - SDP8436-003, KTF102A. Ļoti piemēroti ir arī optopārvadi no veciem lodveida datorkontrolleriem - pelēm; Izstarojošām diodēm īsais vads ir katods, un fototranzistoriem īsais vads ir emitētājs.
Jāatzīmē, ka fototranzistorus labāk izmantot necaurspīdīgā (melnā) korpusā - šajā gadījumā kļūmju un skaitīšanas kļūdu iespējamība, ko rada gaismas traucējumi no ārējiem spilgtiem avotiem, kas skar fotodetektorus. Ja pieejamie fototranzistori ir caurspīdīgi, uz katra no tiem jāuzliek melnas PVC caurules gabals ar caurumu pretī objektīvam un viss sensors jānosedz no svešas gaismas ar melnu papīra vāciņu. Ja aizkars ir izgatavots no gaismu atstarojoša materiāla, ieteicams to pārklāt ar matētu melnu krāsu.
Virsmas rezistoru vietā varat izmantot MLT-0,125 vai S2-23 ar jaudu 0,062 W. Poga SB1 - jebkura poga, kas piemērota montāžas vietai uz tāfeles. E40281-L-O-0-W vietā ir piemērots digitālais indikators FYQ-2841CLR.

Mikrokontrollera programma tika izstrādāta un atkļūdota Proteus vidē, pēc tam tā tika ielādēta mikrokontrollerī, izmantojot ICProg programmētāju. Pēc mikrokontrollera uzstādīšanas panelī, pirmajā un nākamajās skaitītāja ieslēgšanas reizē, indikators parādīs mīnusa zīmi visās pazīstamajās vietās. Pēc aptuveni divām sekundēm displejā parādīsies nulles - tā ir zīme, ka skaitītājs ir gatavs darbam.
Programma nodrošina ārkārtas atmiņas atiestatīšanas funkciju gadījumā, ja tiek saņemta kļūdaina informācija un mikrokontrolleris sasalst (tas notiek ārkārtīgi reti, bet tas var notikt). Lai atgrieztu mikrokontrolleri darba režīmā, jums jāizslēdz skaitītāja barošana, jānospiež poga “Atiestatīt” un, to neatlaižot, jāieslēdz barošana. Tiklīdz displejā parādās nulles, jūs varat turpināt darbu, taču informācija par iepriekšējo apgriezienu skaitu, protams, tiks zaudēta.
Pareizi samontētai ierīcei nav nepieciešama nekāda regulēšana.
-
 2015. gada 17. aprīlisPārtikas dienasgrāmata Android lietotnes
2015. gada 17. aprīlisPārtikas dienasgrāmata Android lietotnes -
 2015. gada 17. aprīlisKā pelnīt naudu ar tālruni?
2015. gada 17. aprīlisKā pelnīt naudu ar tālruni?







